Image matching
In computer vision, image matching is a fundamental task that involves comparing images to determine their similarity. This process typically involves analyzing the visual content of the images (such as shapes, textures, colors, and patterns) to identify common features or regions of interest. Image matching algorithms aim to establish correspondences between these features across the images, enabling tasks such as object recognition, image retrieval, image registration, and motion tracking. These algorithms use various techniques, including feature extraction, feature description, feature matching, and geometric verification, to accurately align and compare images. Image matching plays a crucial role in many computer vision applications, ranging from augmented reality and robotics to medical imaging and satellite remote sensing, enabling machines to interpret visual information with human-like proficiency.
Description
The objective of this exercise is to find similarities between two images using different methods. For this purpose, we will find key points in the first image and match these to the key points found in the second image:


We will address two different methods for image matching:
ORB (Oriented FAST and Rotated BRIEF): ORB is a feature detection and description algorithm in computer vision. It combines the FAST (Features from Accelerated Segment Test) keypoint detector and the BRIEF (Binary Robust Independent Elementary Features) descriptor. ORB is known for its computational efficiency and robustness to viewpoint changes and lighting variations. It detects keypoints in images using FAST and computes binary descriptors using BRIEF, which makes it suitable for real-time applications such as object recognition and tracking.
SIFT (Scale-Invariant Feature Transform) with BF matching: SIFT is a feature detection and description algorithm. It identifies distinctive keypoints in images that are invariant to scale, rotation, and illumination changes and describes these keypoints using histograms of gradient orientations. SIFT is widely used in object recognition, image stitching, and 3D reconstruction.
For the matching step, this code is focused on two approaches:
BF (Brute Force): this matching involves comparing every feature descriptor extracted from one image with every feature descriptor from another image to find the best matches. This procedure makes this method computationally expensive.
FLANN (Fast Library for Approximate Nearest Neighbors): in this case, the matching of the points is done using FLANN, which is a library that can approximate nearest neighbor searches in high-dimensional spaces. This reduces the time needed for the matching and improves the final result.
In this exercise, you will be able to try the performance of ORB with BF, SIFT with BF and SIFT using FLANN matching.
Requirements
(libraries to install):
pip install numpy
pip install cv2
pip install argparse
pip install matplotli
Execution
Inside the folder in the CMD, you can execute the program. You must determine which matching method you would like to use by chossing between ORB, SIFT, or FLANN:
python 04_image_matching.py -m{ORB, SIFT, FLANN}
For example, if you want to try the last method, you would execute:
python 04_image_matching.py -m FLANN
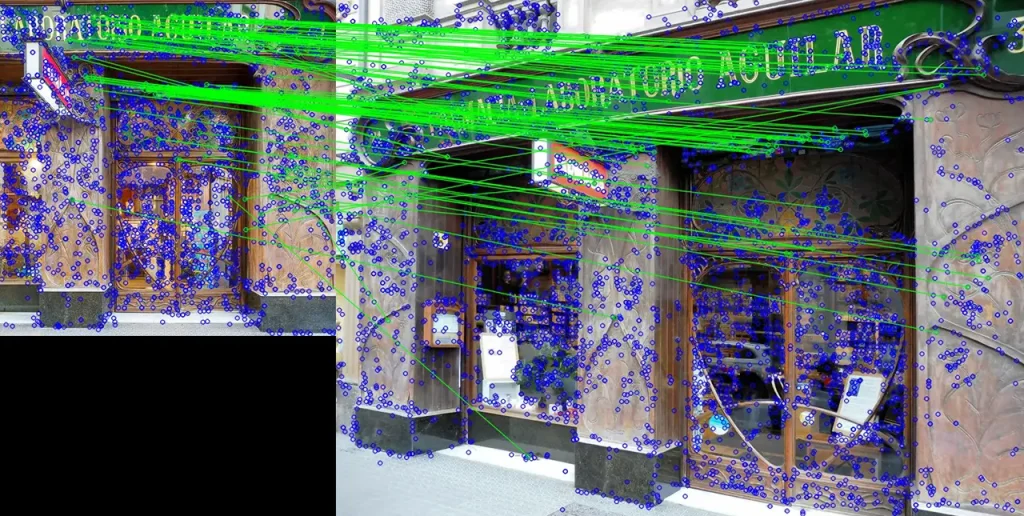
The method selected (ORB or SIFT) will find the keypoints in both images. These keypoints are defined by a specific descriptor. Then, the descriptors of both images are compared, ordering and joining the most similar between them. Finally, these matches are filtered, showing only those that are similar enough.
The keypoints matched with SIFT and FLANN are shown in the next image. The points detected are marked in blue, while the related points are shown with green lines connecting them. You can change the threshold and compare the results between methods.
Download
To receive the “Image matching” code, please fill out the form below.
Upon submission, we’ll promptly send you the ZIP file containing the code you requested. Please ensure you’ve checked your spam folder if you don’t receive our email shortly after submitting your request.