Introduction
Agricultural robots automate slow, repetitive and dull tasks for farmers, allowing them to focus more on improving overall production yields. ROMI project is located at the intersection of microfarming and robotics linking specialized partners spread around Europe.
A new generation of farmers are starting small innovative market gardens in rural, peri-urban and urban areas across Europe. These farms often grow polycultures of up to 100 different varieties per year on small surfaces between 0.01 to 5 hectares. Polyculture and organic microfarms are proving to be highly productive, sustainable and economical, yet some of the on-the-ground experiences of farming communities are still unknown. ROMI aims to develop a better understanding of this emerging field through research, events and the development of specialised techniques and tools.
Context
ROMI is a four-year Europe-funded research project committed to promote a sustainable, local, and human-scale agriculture. It is developing an affordable, multipurpose platform adapted to support organic and polyculture market-garden farms.
The platform constitutes robotic tools, research, data and shared documentation and aims to help farming communities increase their production and improve their working conditions.

WP3 Aerial Robotics
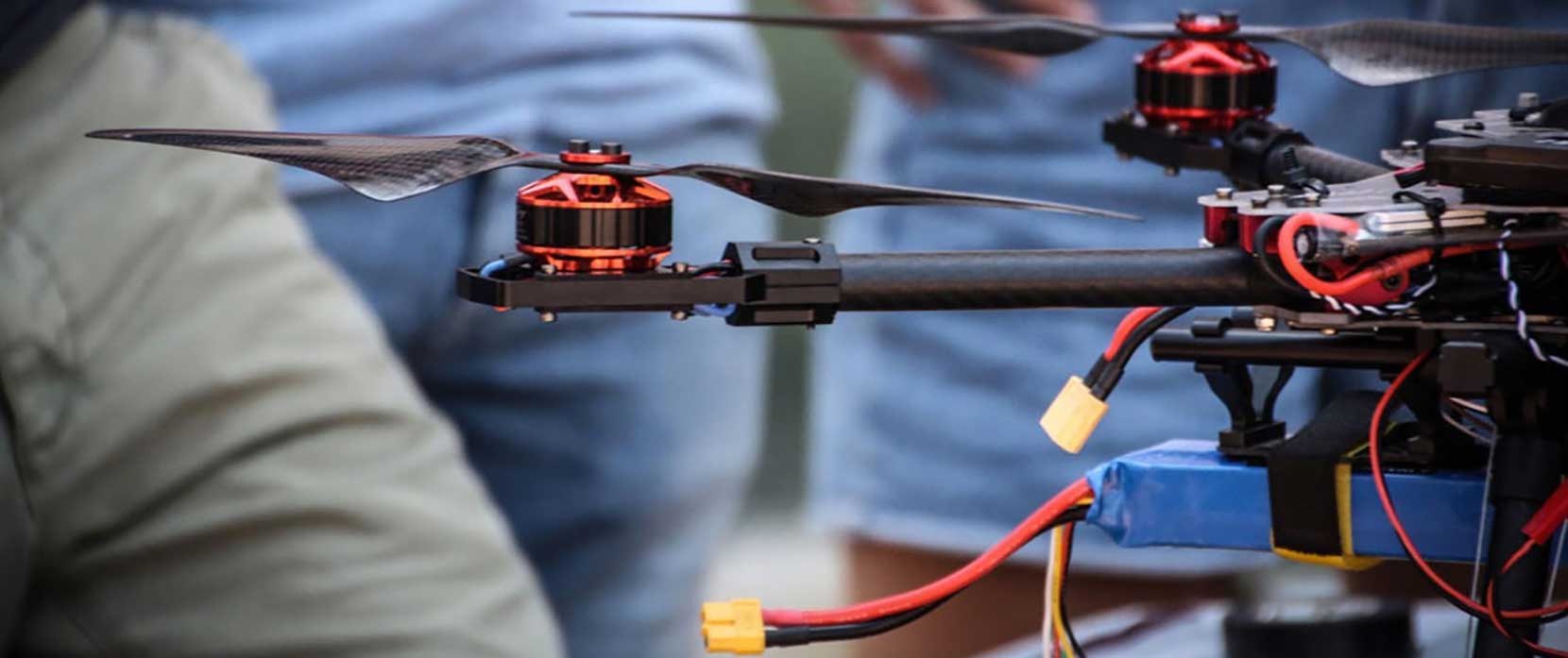
IAAC, in collaboration with Fab Lab Barcelona and Noumena, is developing aerial robotic solutions to tackle the necessity of farmers in heterogeneous environments. Noumena previous experience on this topic rely on the development of N.E.Ro – Networking Environmentals RObotics, a series of autonomous aerial and land robots, developed, designed and programmed in order to accomplish specific tasks: from fields mapping to urban analysis. This workflow allows to automate repetitive tasks and to simplify complex procedures.
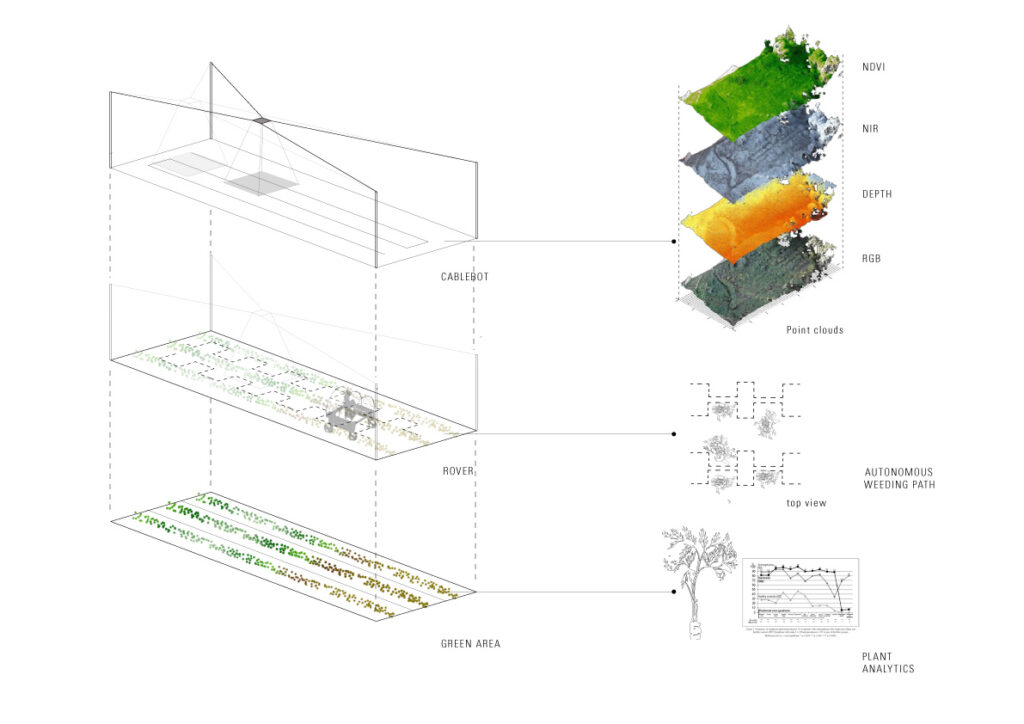
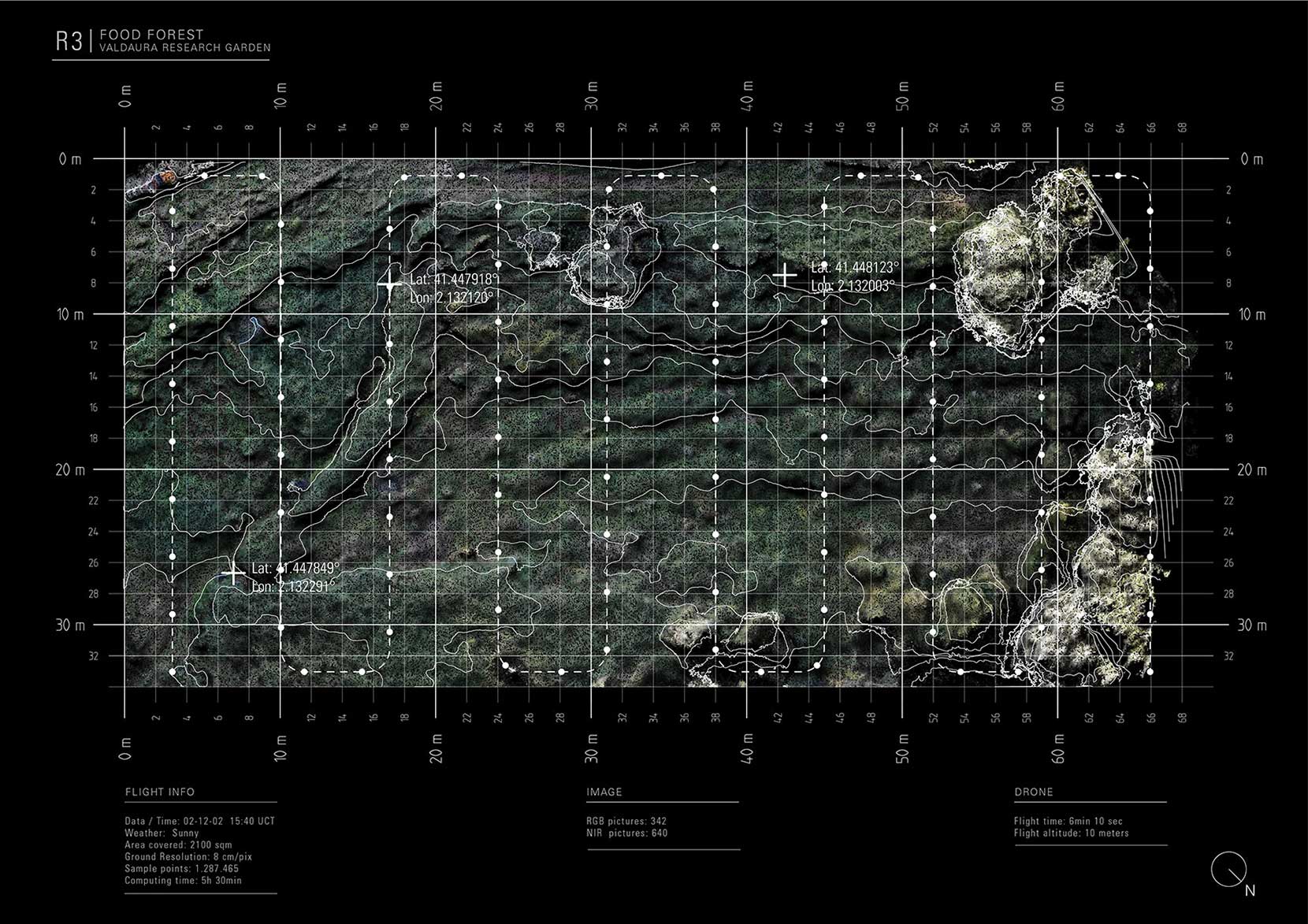
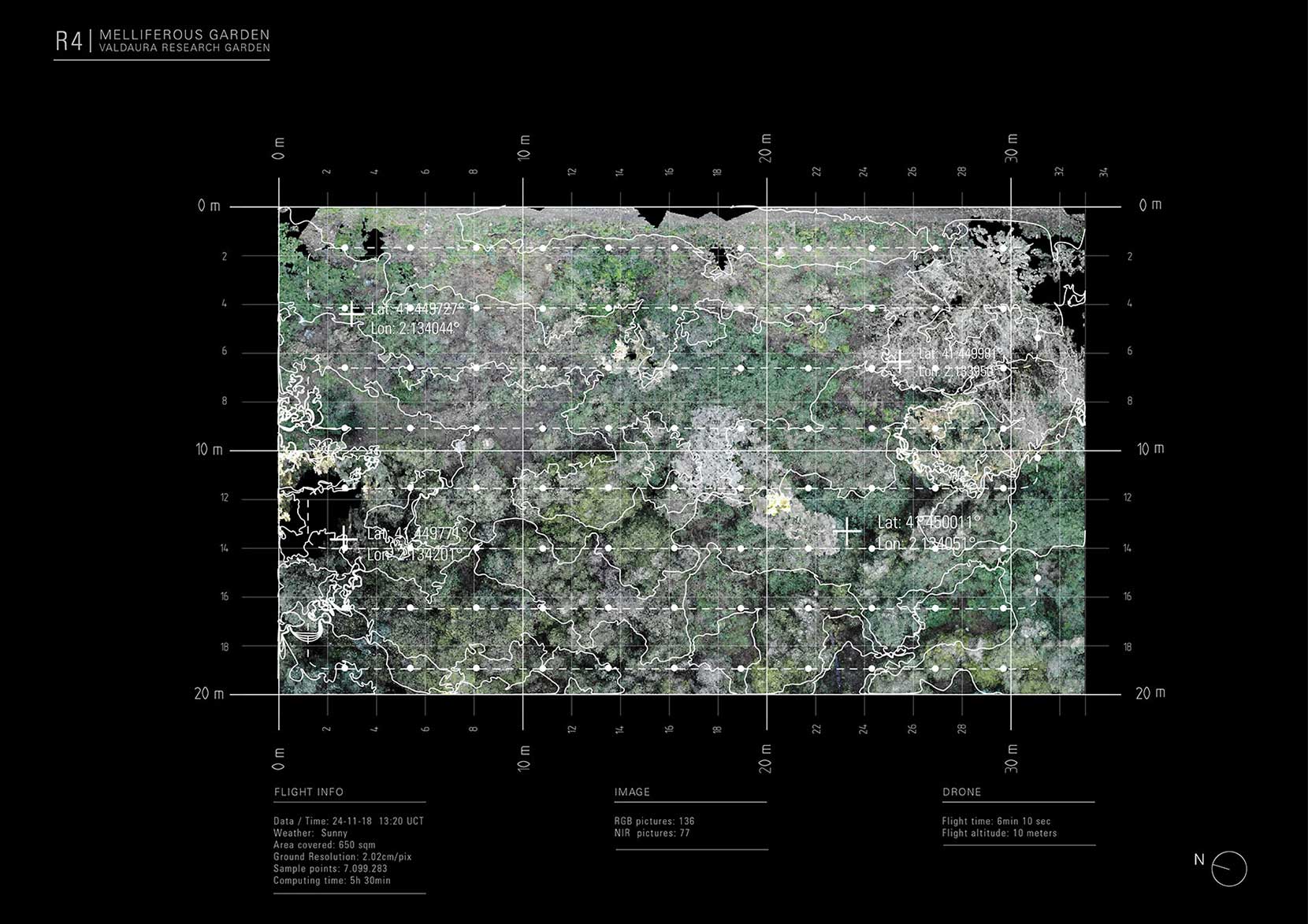
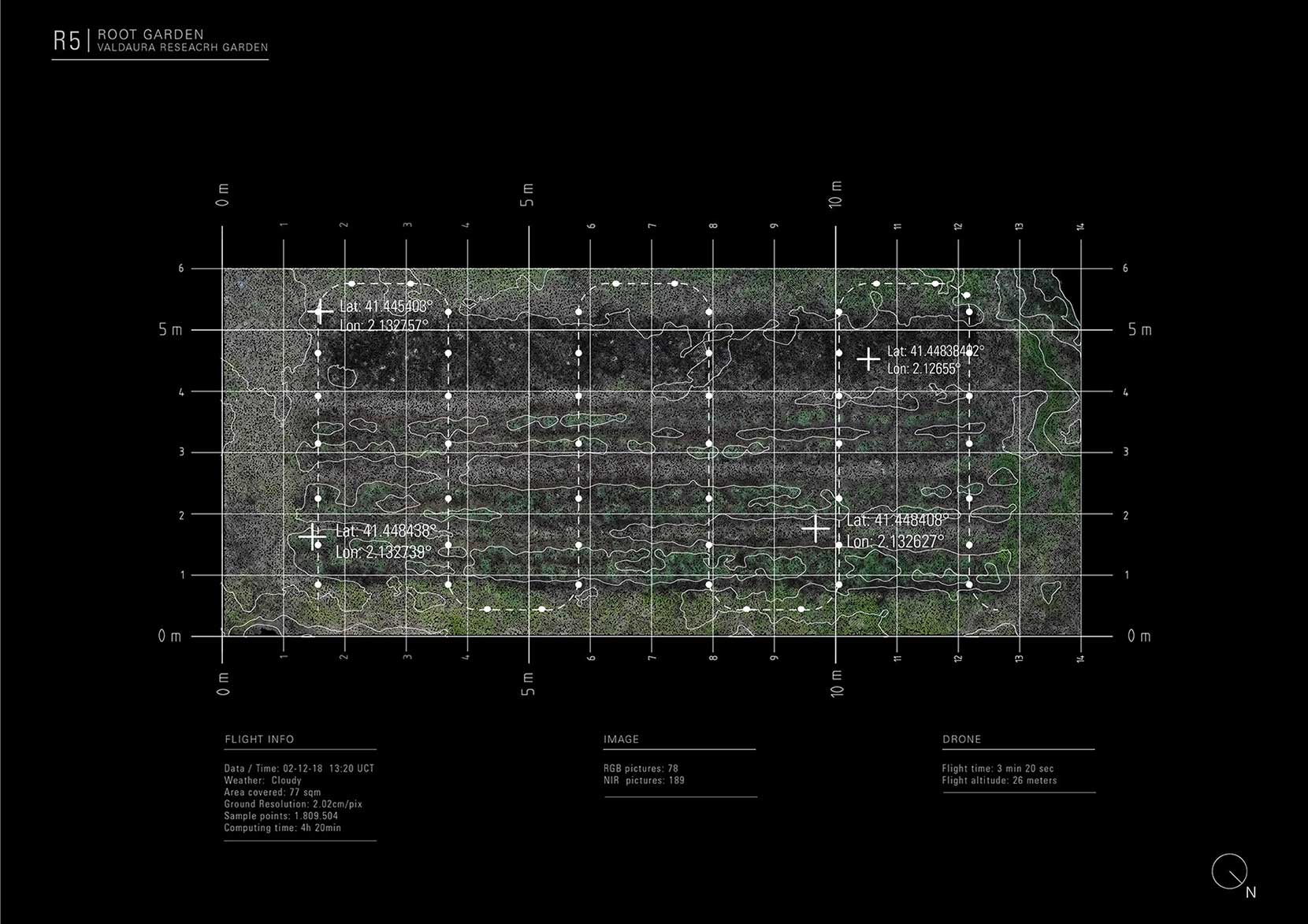
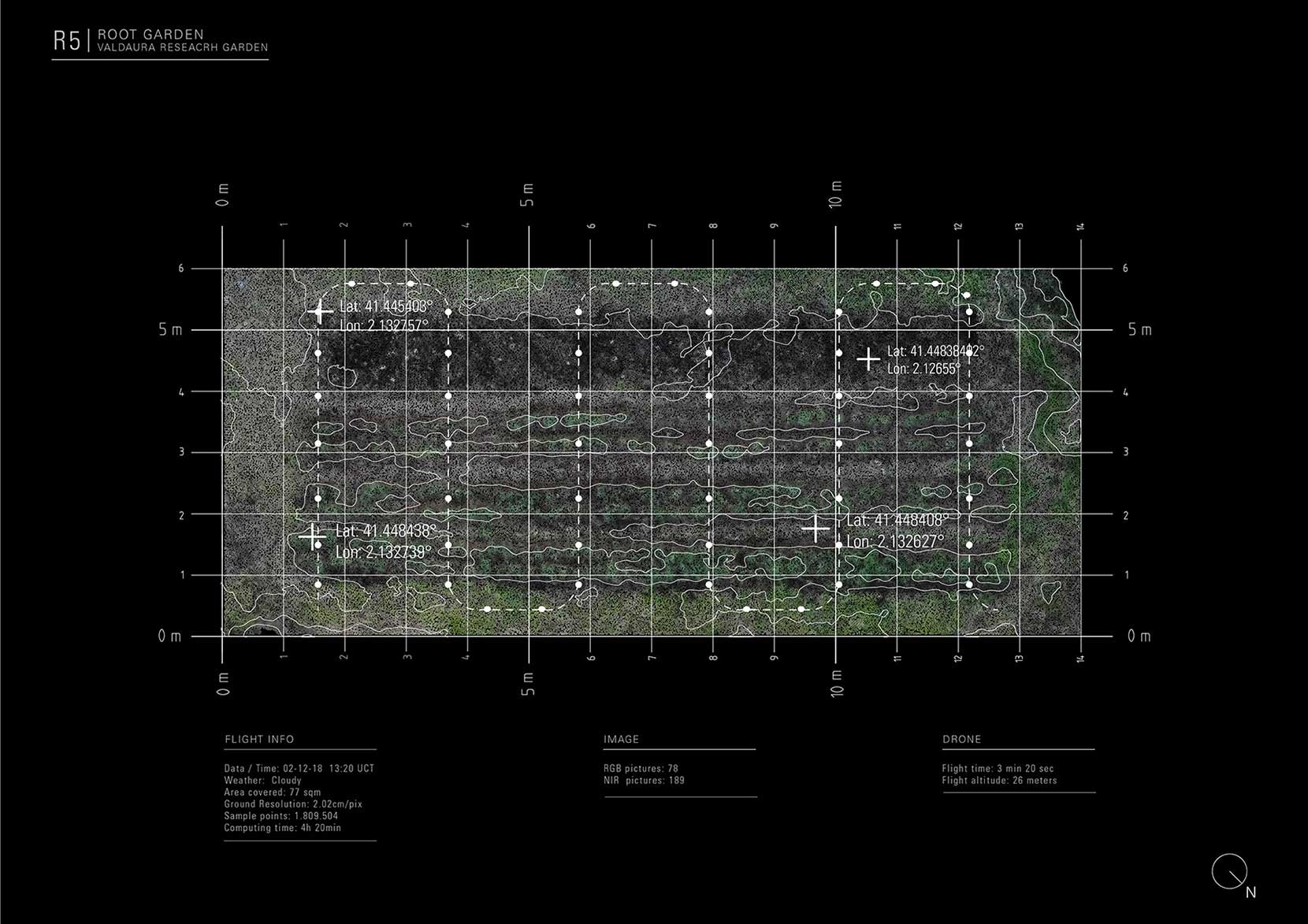
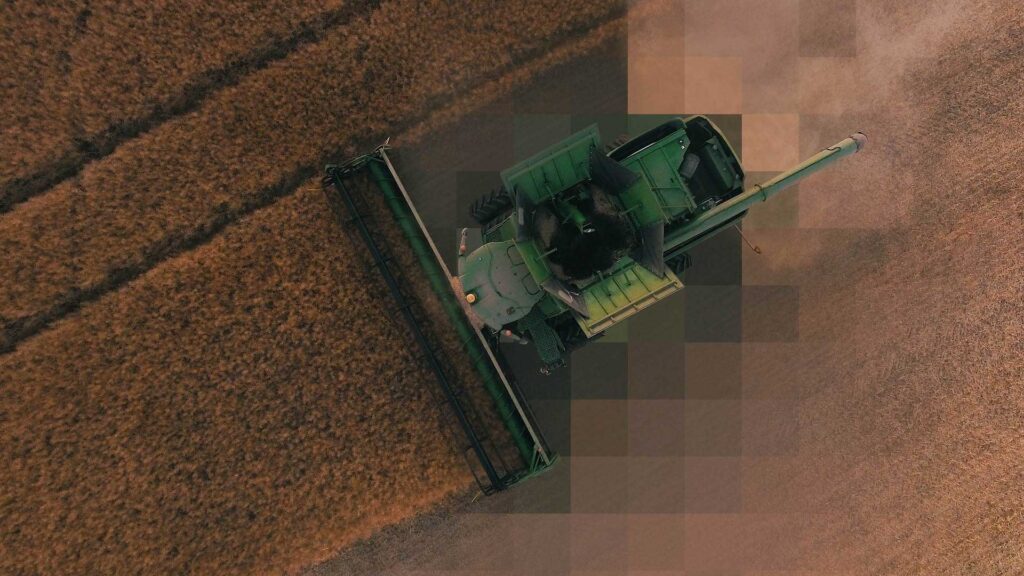
The proposed workflow is based on automated robotic collection of multispectral images using an aerial robot that provide precise information to a ground rover equipped with actuators to locally operate on specific plants.
This solution allow us to remotely gather images, store it online and program the most efficient path to minimize timing and resource usage of the overall operation.
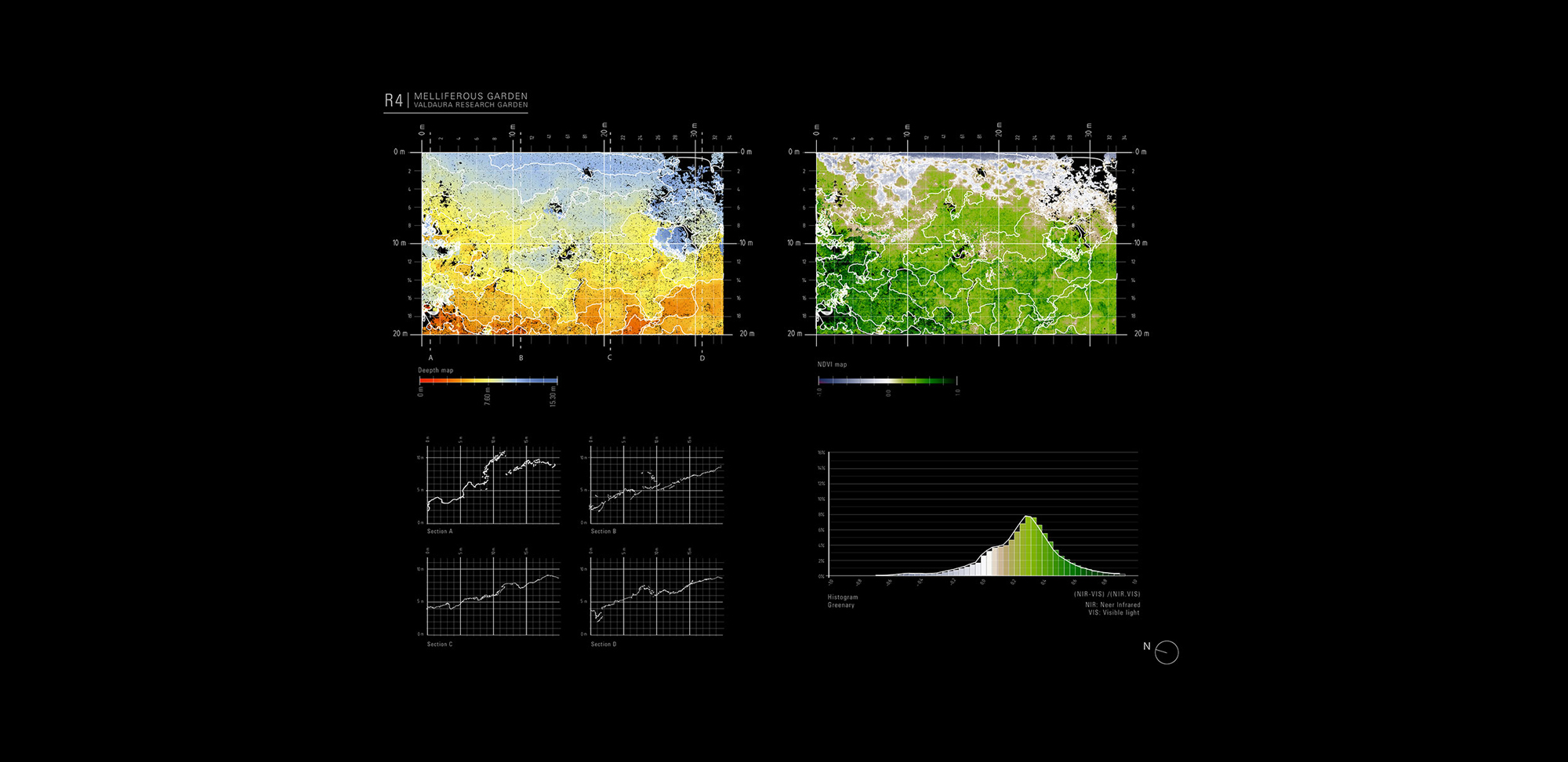
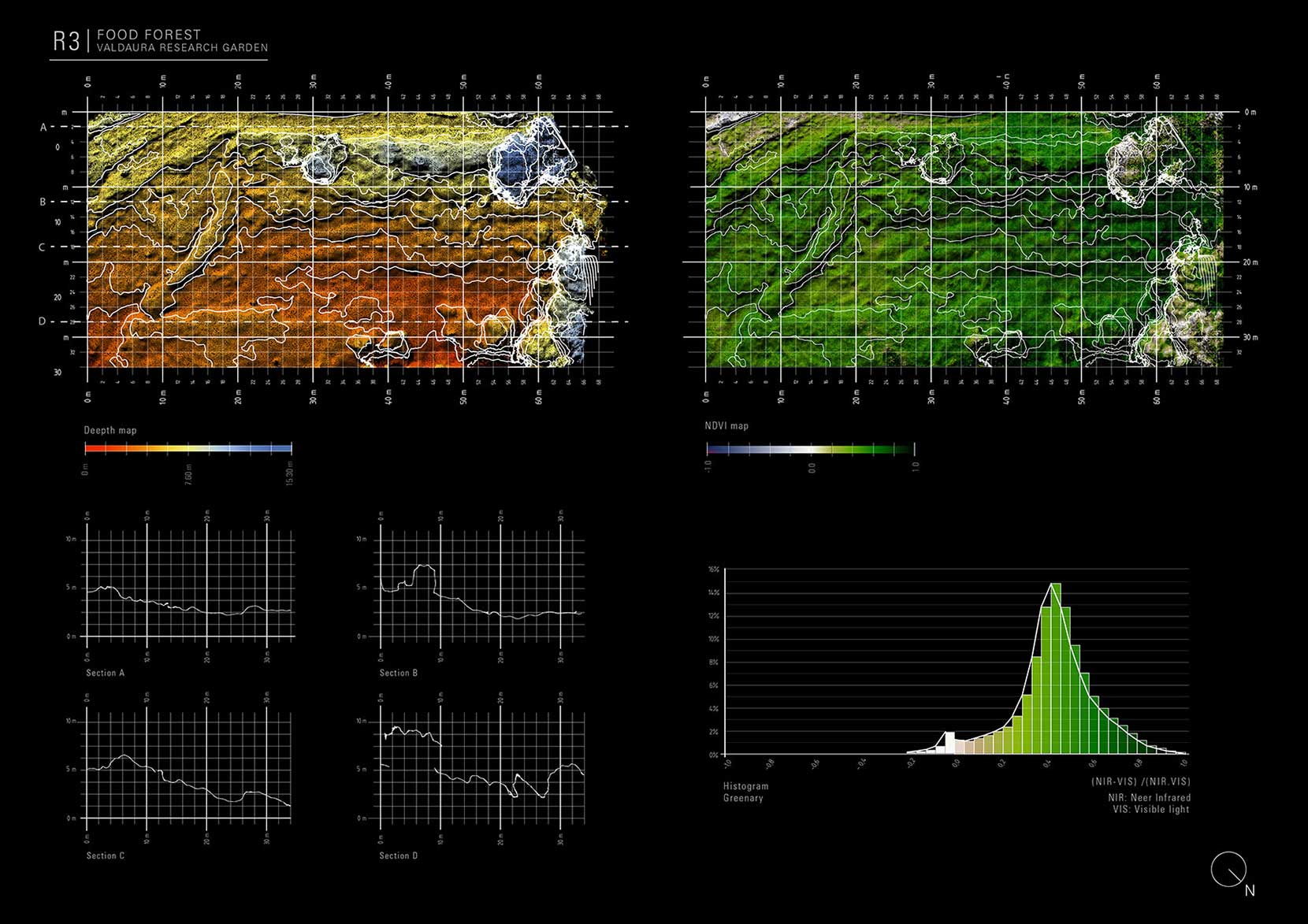
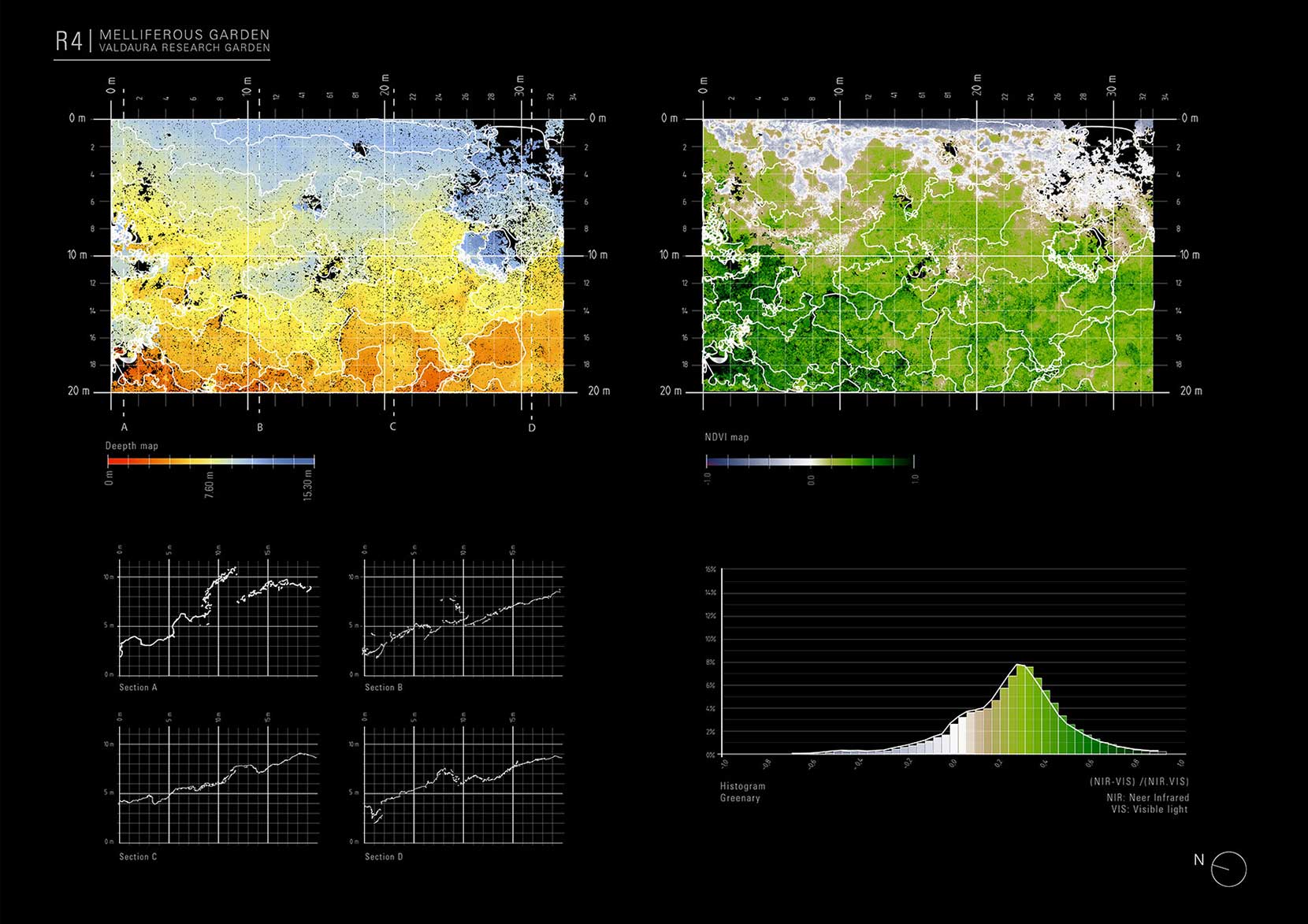
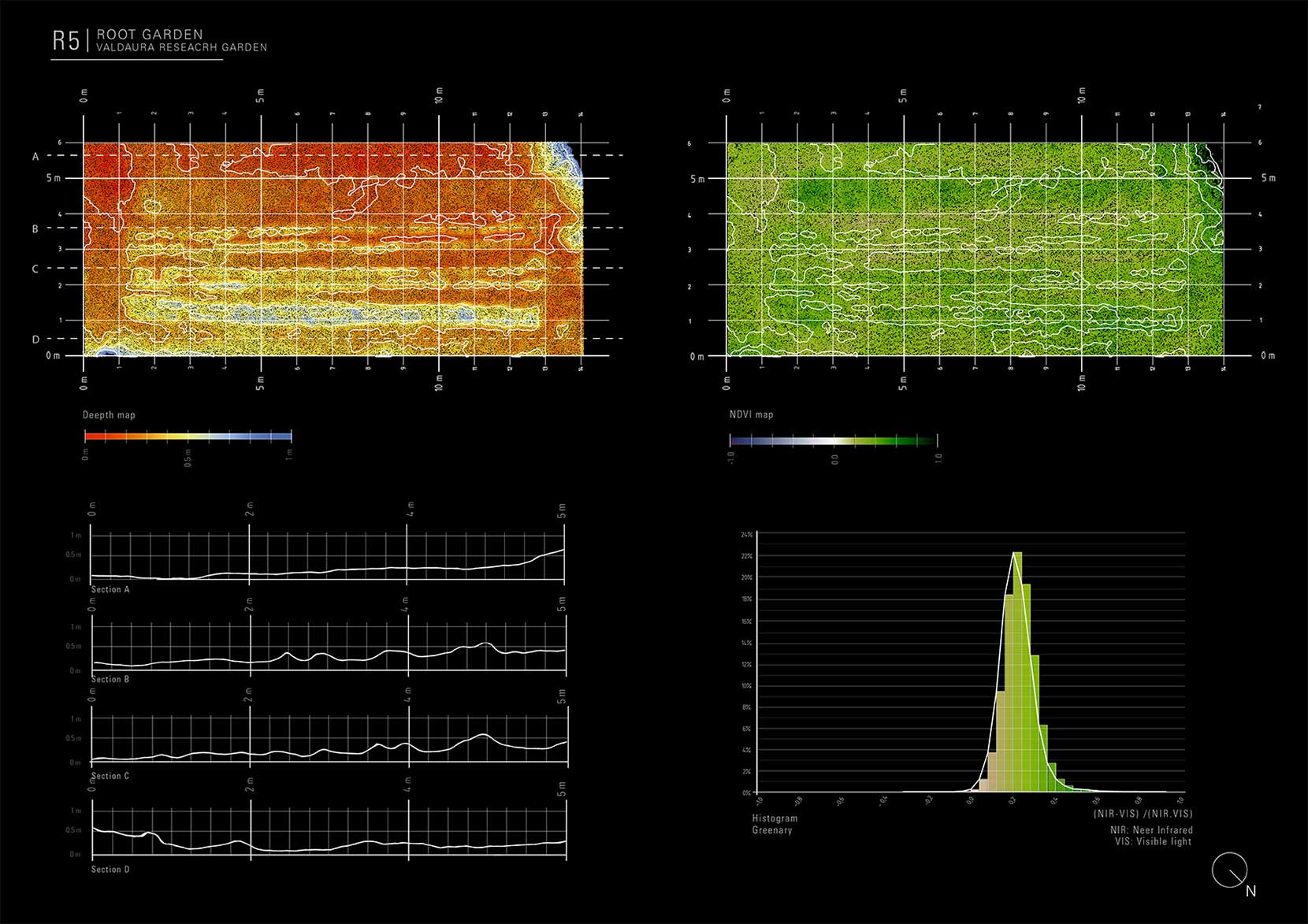
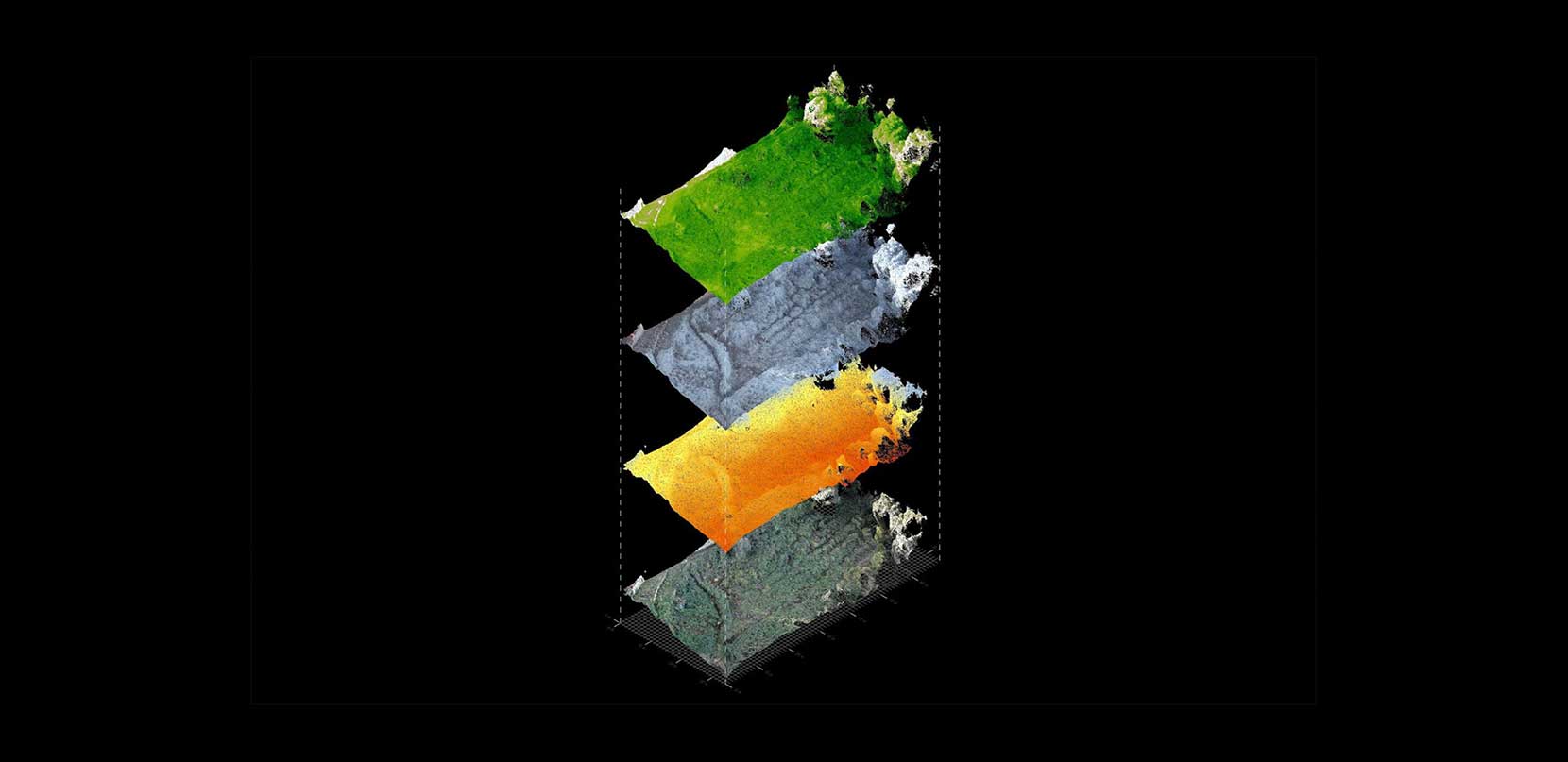
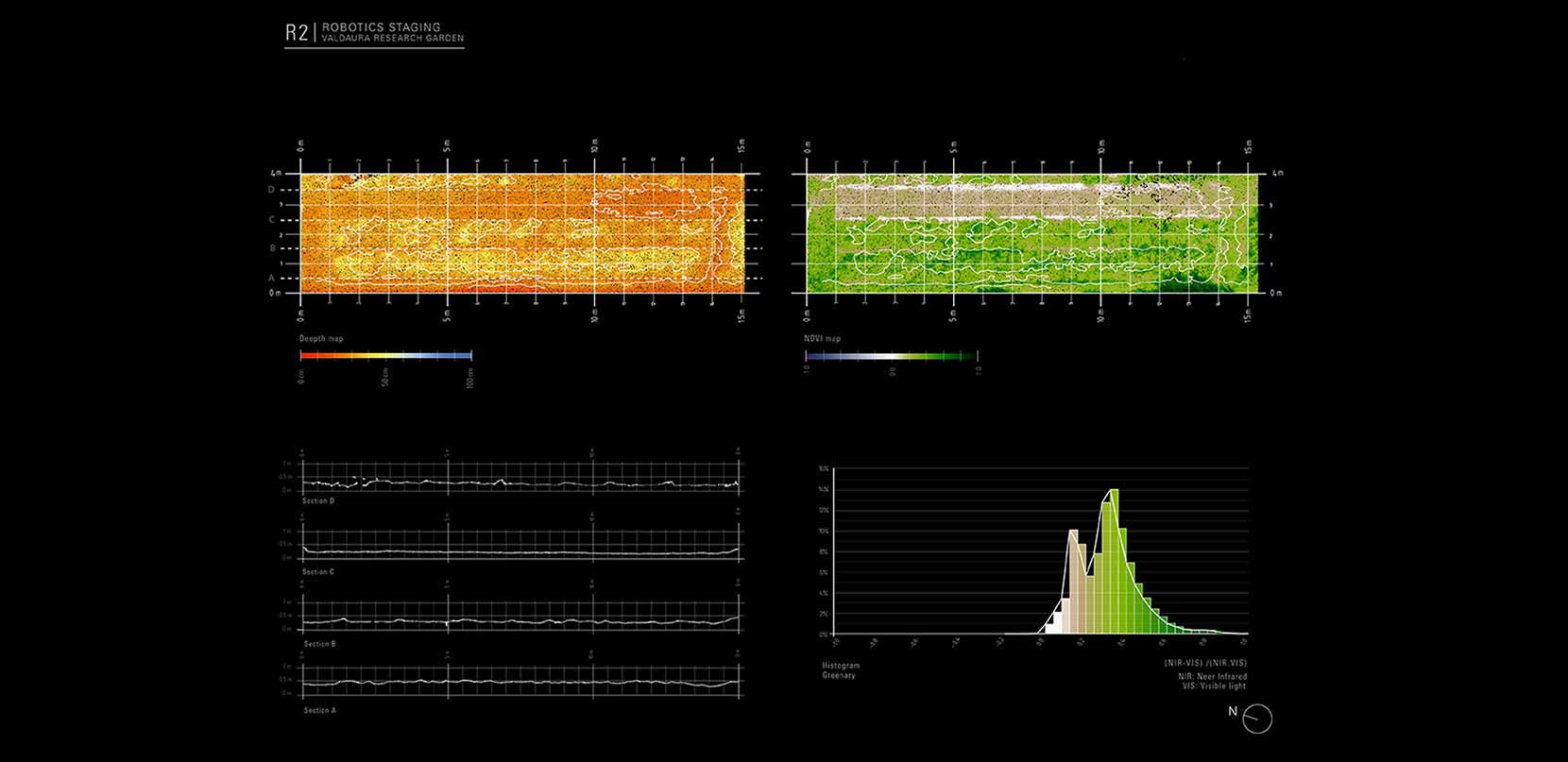
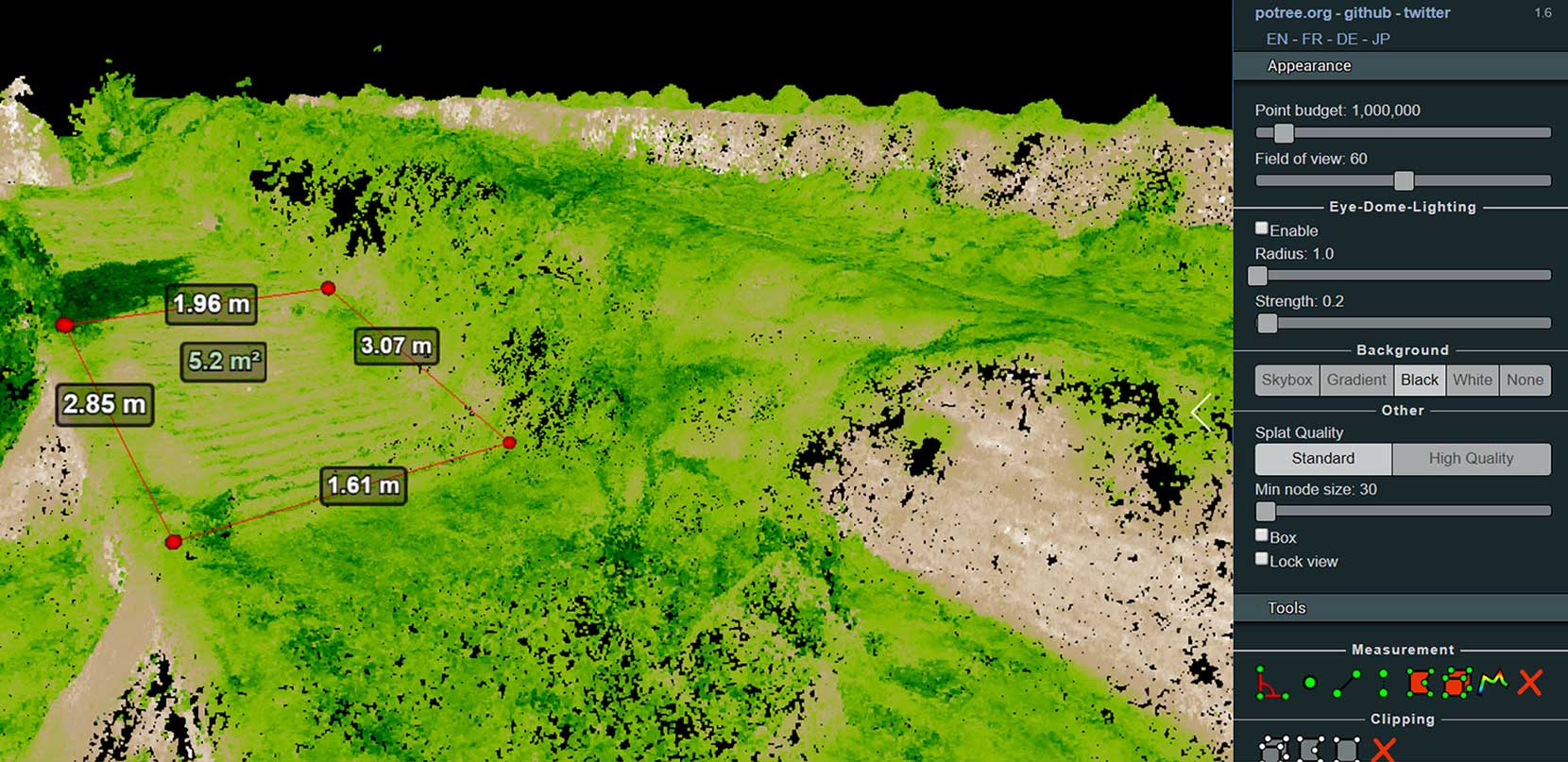
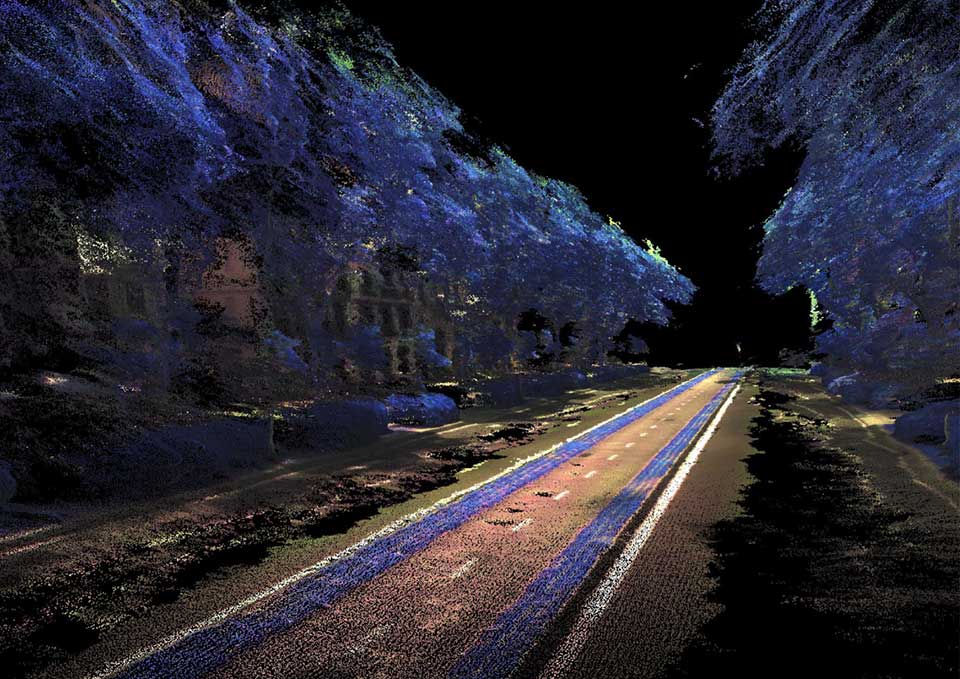
Data processing is developed through a specific customized method, generating one single point cloud, storing RGB, NDVI and Thermal Data over the same geometrical organization. This serves as a base to store the additional layers like the typology of plant, the health status, and the growth rate.

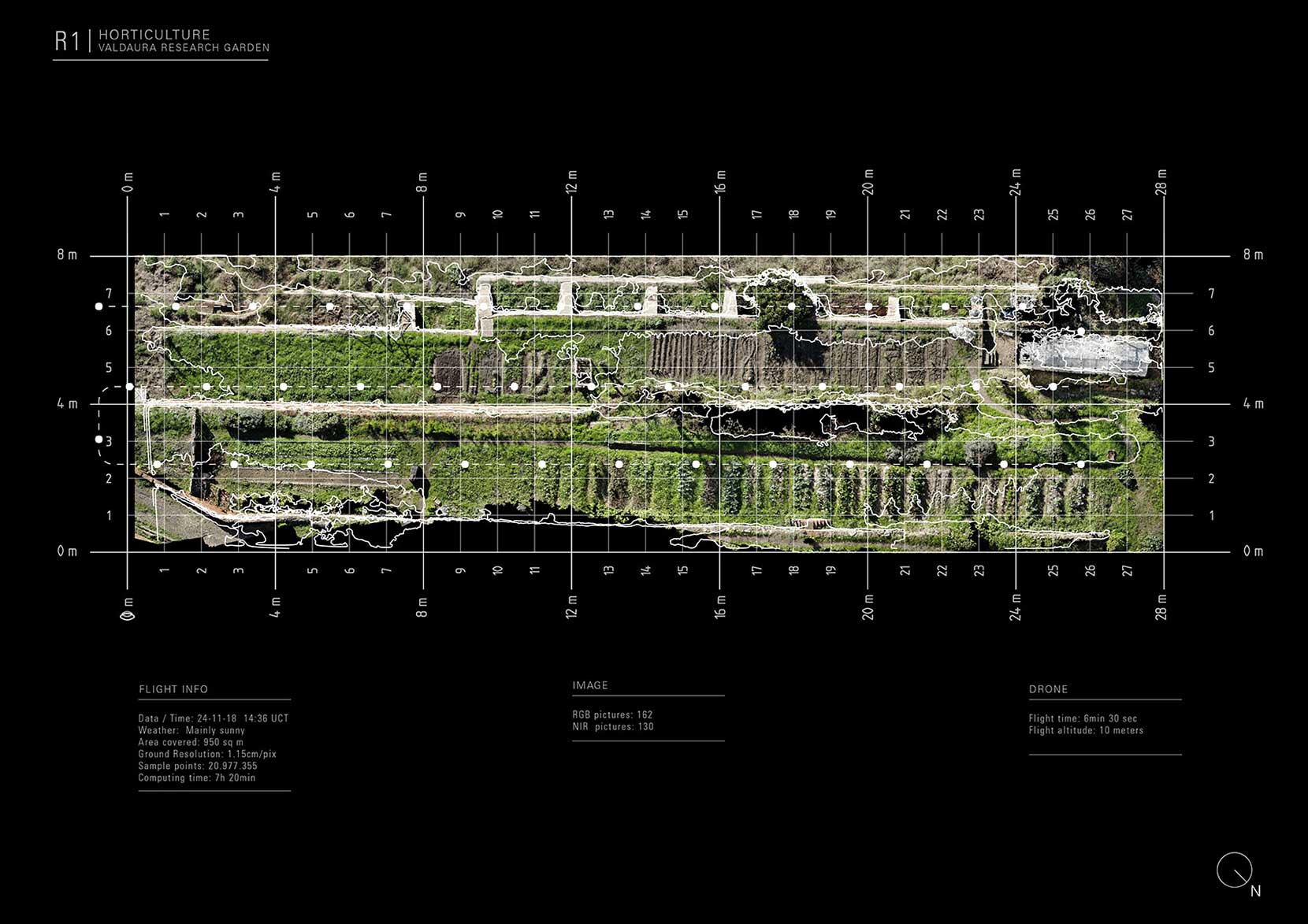
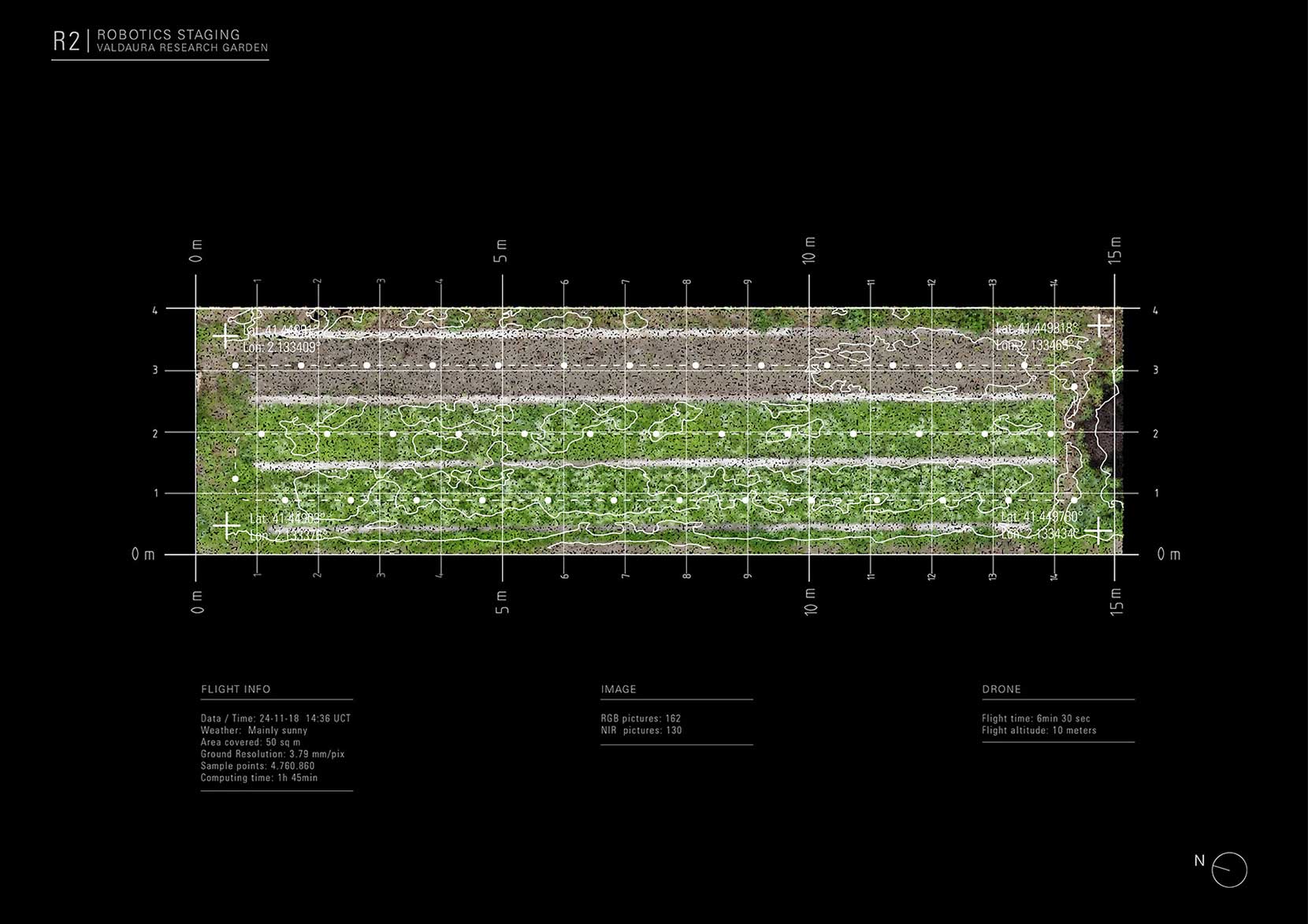
VEGETABLES GARDEN DATA
Type: 3 rows cultivation
Area: 72sqm (14×5 meters)
Distance from the ground: 2.50m
Slope: none
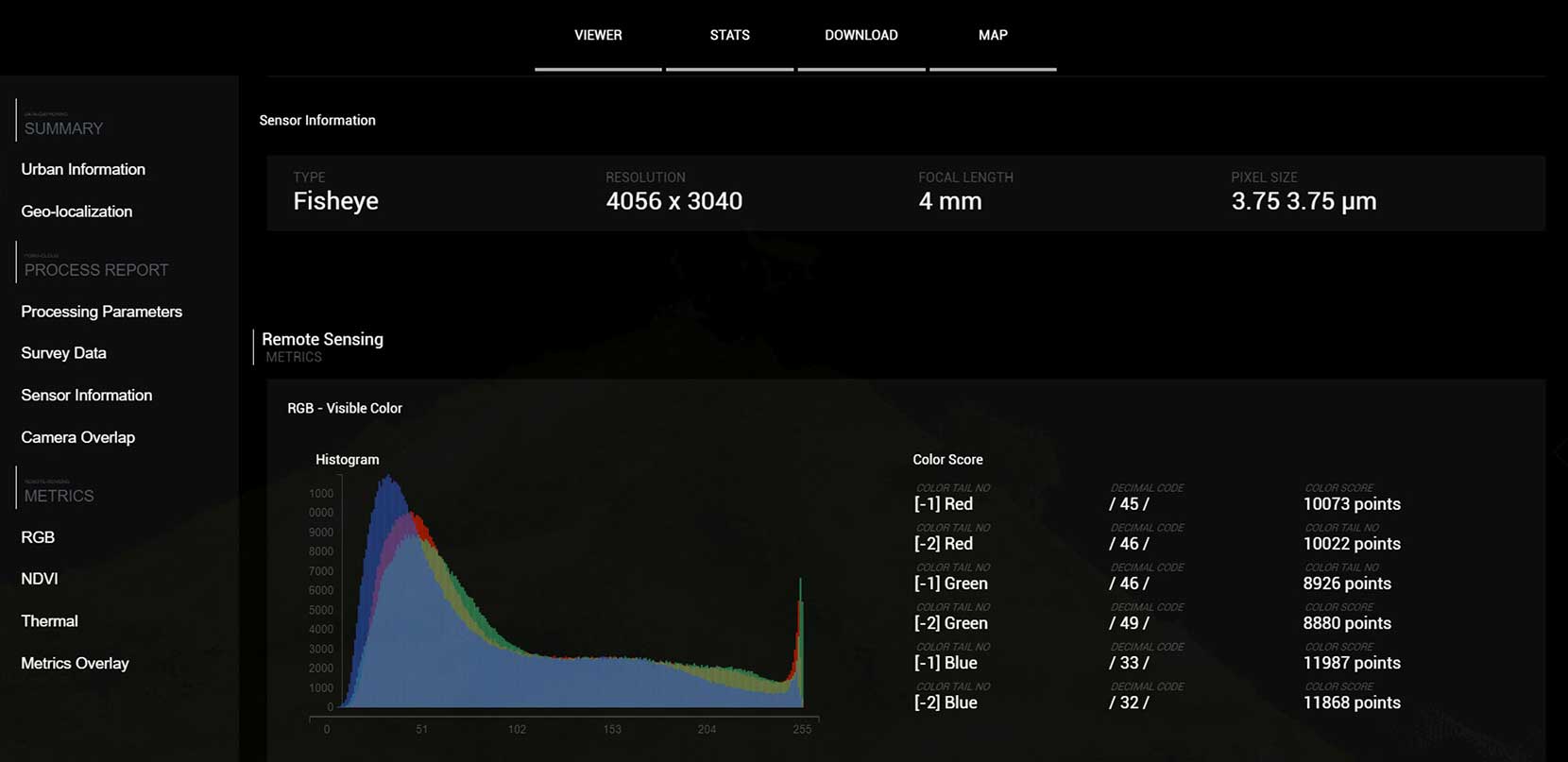
CAMERA INFORMATION
Type: Mapir Survey 3W
Filter: OCN (Orange Cyan Nir)
Tools: Calibration target
Extra: Pi cam live streaming
OUTPUT
Format: RAW
Capture distance: 50cm
Gps: Yes
Color marker: Yes



Credits
Year → 2020 / WP3 Leader IaaC – Institute for Advanced Architecture of Catalunya / WP3 CollaboratorsFab Lab Barcelona, Green Fab Lab, Noumena / Period 2018-2022 / Principal Partners EU Commission Horizon 2020 / Financial FEI / Technological SONY CSL, Inria, CNRS / Institutions IaaC, Humboldt University / Farming Community Can Valldaura, Pepinieres Chatelain
Related Sectors
Contacts
HEADQUARTER
C/ de Cristóbal de Moura, 203,
08019 Barcelona, Spain
CONTACTS
P (+34) 937 420 927
E info@noumena.io
General Enquiries
Manage Consent
Functional
Always active
The technical storage or access is strictly necessary for the legitimate purpose of enabling the use of a specific service explicitly requested by the subscriber or user, or for the sole purpose of carrying out the transmission of a communication over an electronic communications network.
Preferences
The technical storage or access is necessary for the legitimate purpose of storing preferences that are not requested by the subscriber or user.
Statistics
The technical storage or access that is used exclusively for statistical purposes.
The technical storage or access that is used exclusively for anonymous statistical purposes. Without a subpoena, voluntary compliance on the part of your Internet Service Provider, or additional records from a third party, information stored or retrieved for this purpose alone cannot usually be used to identify you.
Marketing
The technical storage or access is required to create user profiles to send advertising, or to track the user on a website or across several websites for similar marketing purposes.